4D Scanning and Printing
Lattice Design
Members:
Shane Transue
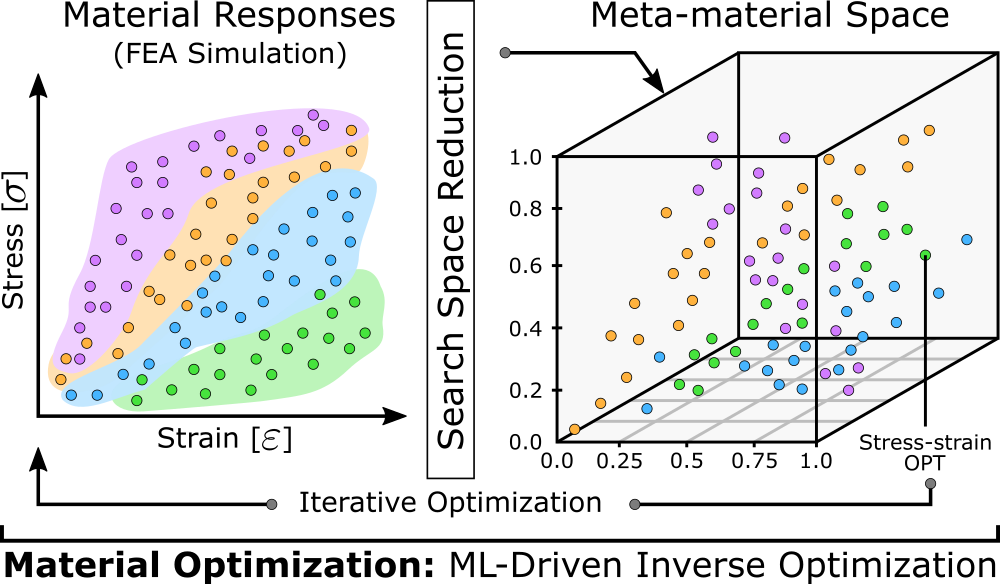
Description: In this work, we provide a method for controlling elastic material behavior through data-driven microstructure optimization provides a viable method for inversely computing geometric constraints that define material deformation. The complexity of this inverse problem is driven by the high dimensionality of the solution space (curse of dimensionality) which includes: TPU material property modeling, geometric parameterizations, environmental factors, and accurately replicating real-world deformations of 3D prints. To achieve this, we propose a data-driven form of nonlinear simulation of Representative Volume Elements (RVE) optimization for isotropic material samples to generate unit lattice structures that replicate predefined deformation behaviors based on a given stress-strain curve. Given a curve describing the dynamic behaviors of a lattice design, an inverse predictive model will be developed. This model will solve the problem of obtaining lattice design geometric parameters that generate predefined behaviors defined by the curve. This defines the desired deformation behavior with fixed TPU material properties (Young’s Modulus E, Poisson ratio v, etc.) through geometric lattice structure optimization.
Download Links:
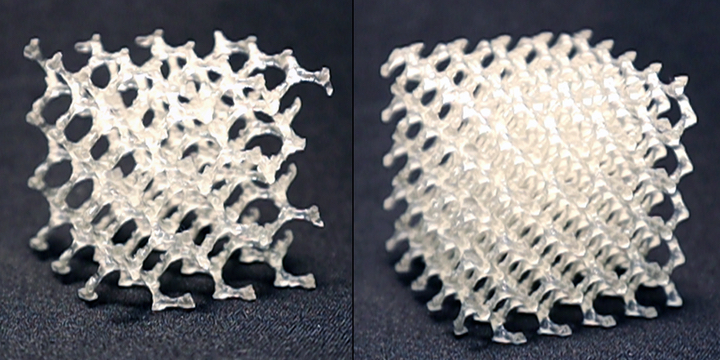
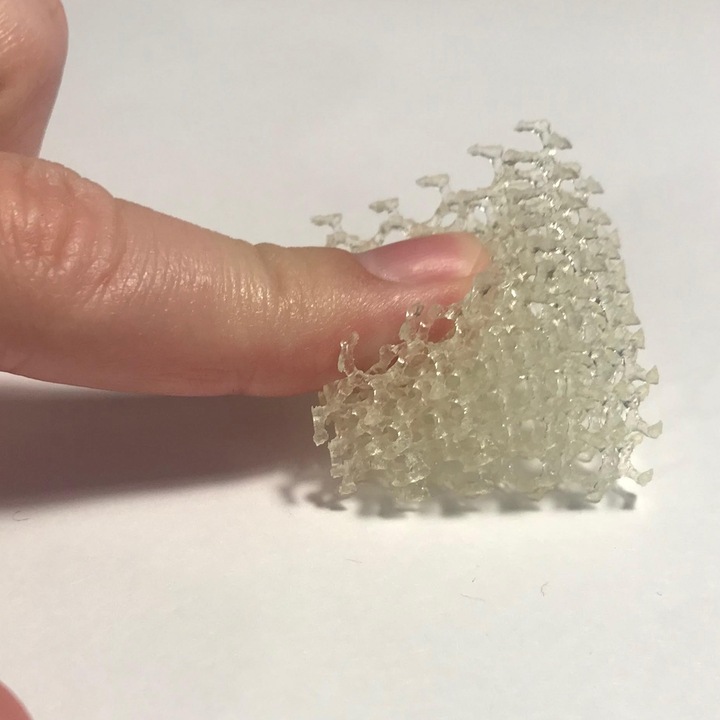
Generative Deformation: Procedural Perforation for Elastic Structures
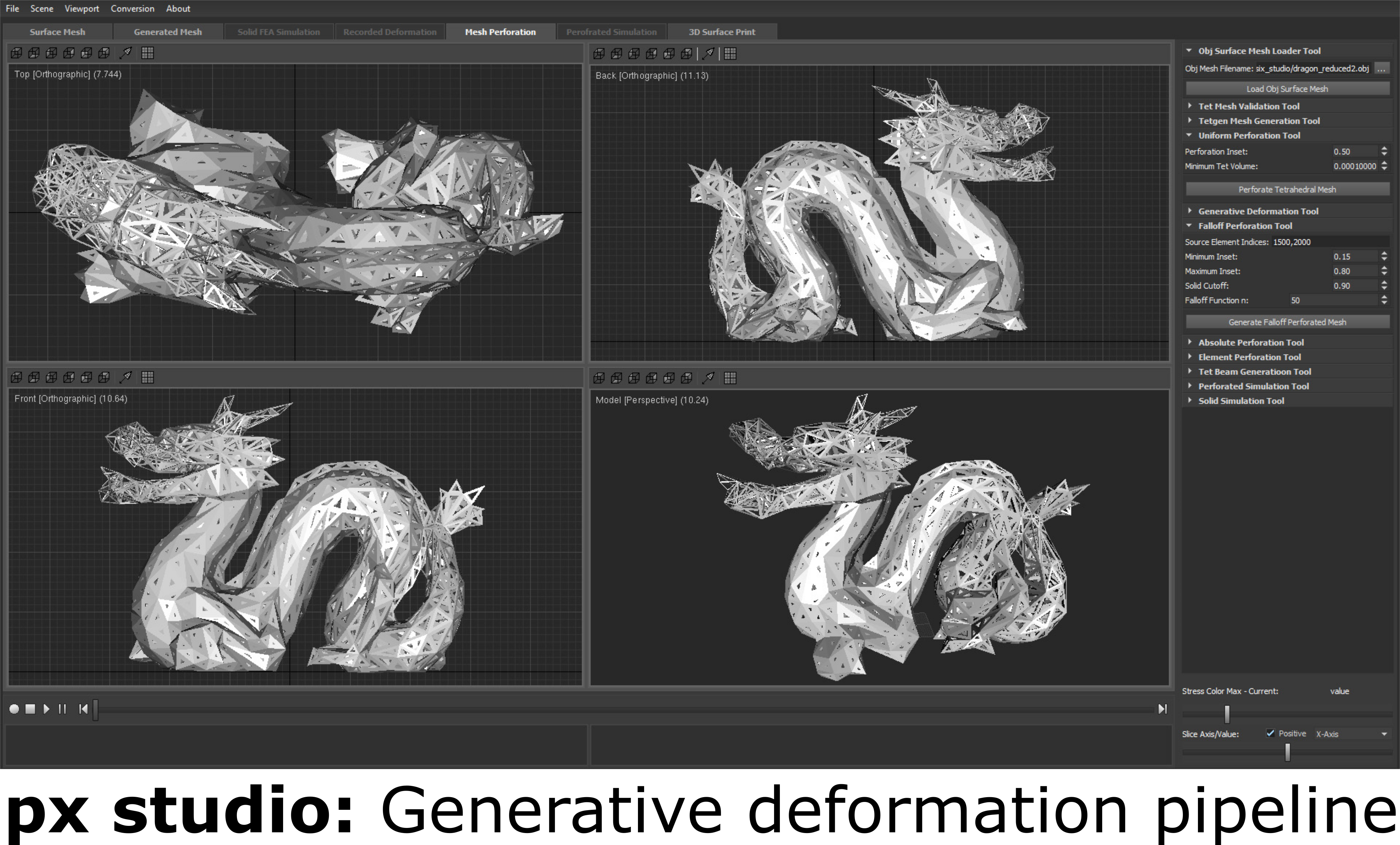
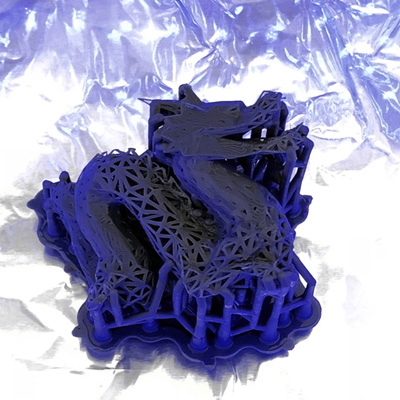
Description: Procedural generation of elastic structures pro- vides the fundamental basis for controlling and designing 3D printed deformable object behaviors. The automation through generative algorithms provides flexibility in how design and functionality can be seamlessly integrated into a cohesive pro- cess that generates 3D prints with variable elasticity. Generative deformation introduces an automated method for perforating existing volumetric structures, promoting simulated deforma- tions, and integrating stress analysis into a cohesive pipeline model that can be used with existing consumer-level 3D printers with elastic material capabilities. In this work, we present a consolidated implementation of the design, simulate, refine, and 3D print procedure based on the automated generation of heterogeneous lattice structures. We utilize Finite Element Analysis (FEA) metrics to generate perforated deformation models that adhere to deformation behaviors created within our design environment. We present the core algorithms, automated pipeline, and 3D print deformations of various objects. Quantitative results illustrate how the heterogeneous geometric structure can influence elastic material behaviors towards design objectives. Our method provides an automated open-source tool for quickly prototyping elastic 3D prints.
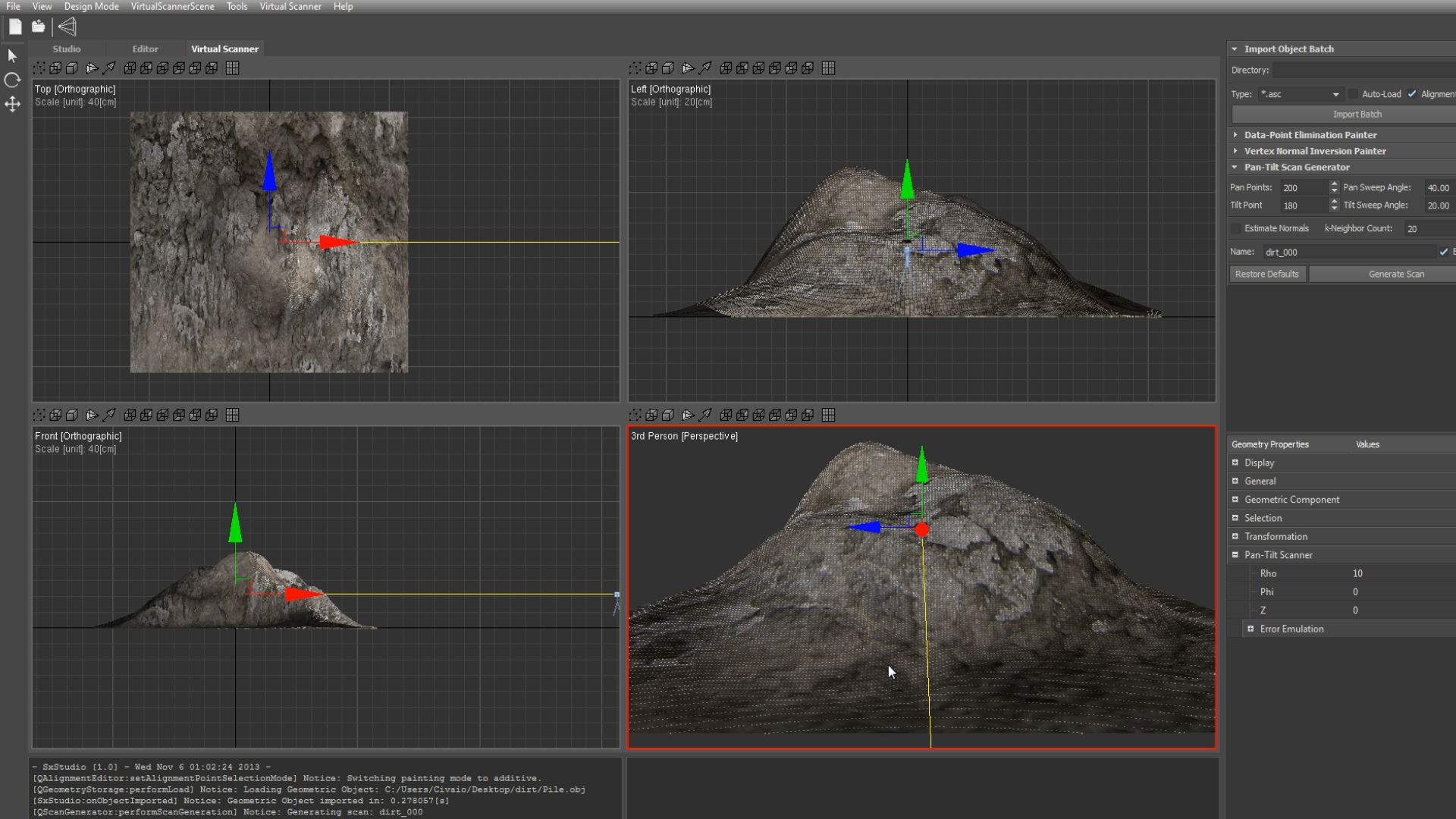
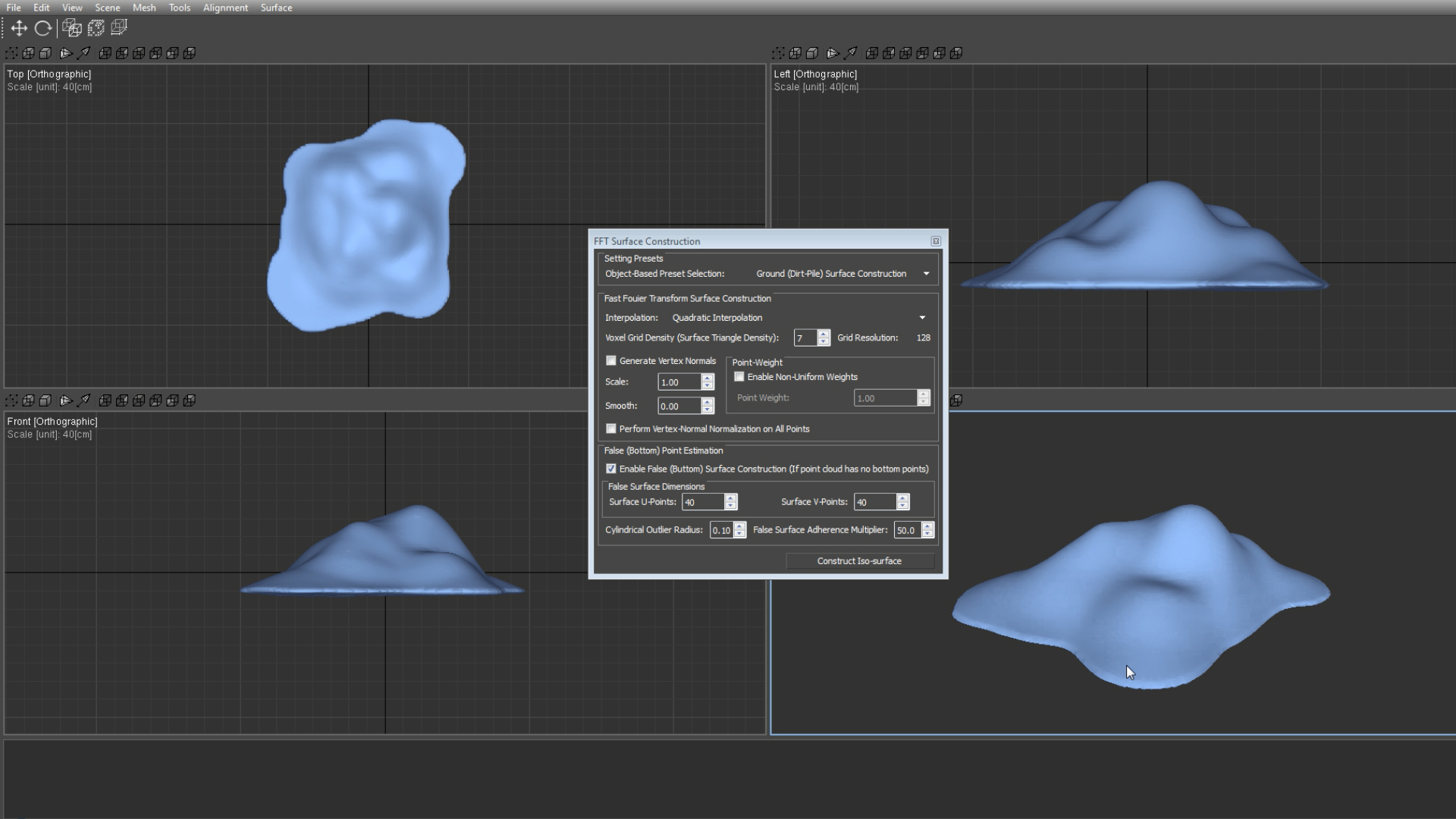
Intuitive Alignment of Point-Clouds with Painting-Based Feature Correspondence
Members:
S. Transue,
M. Choi
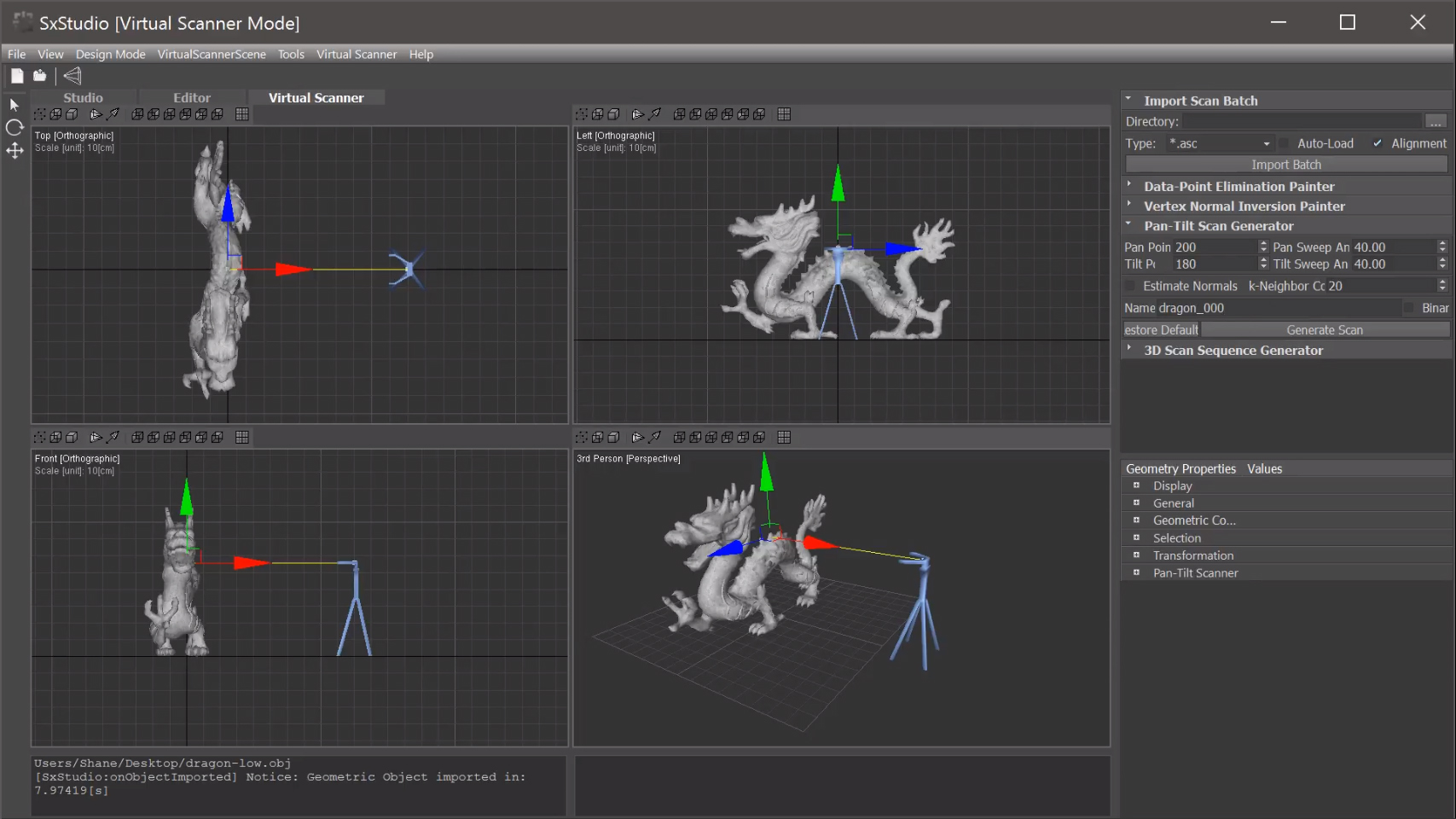
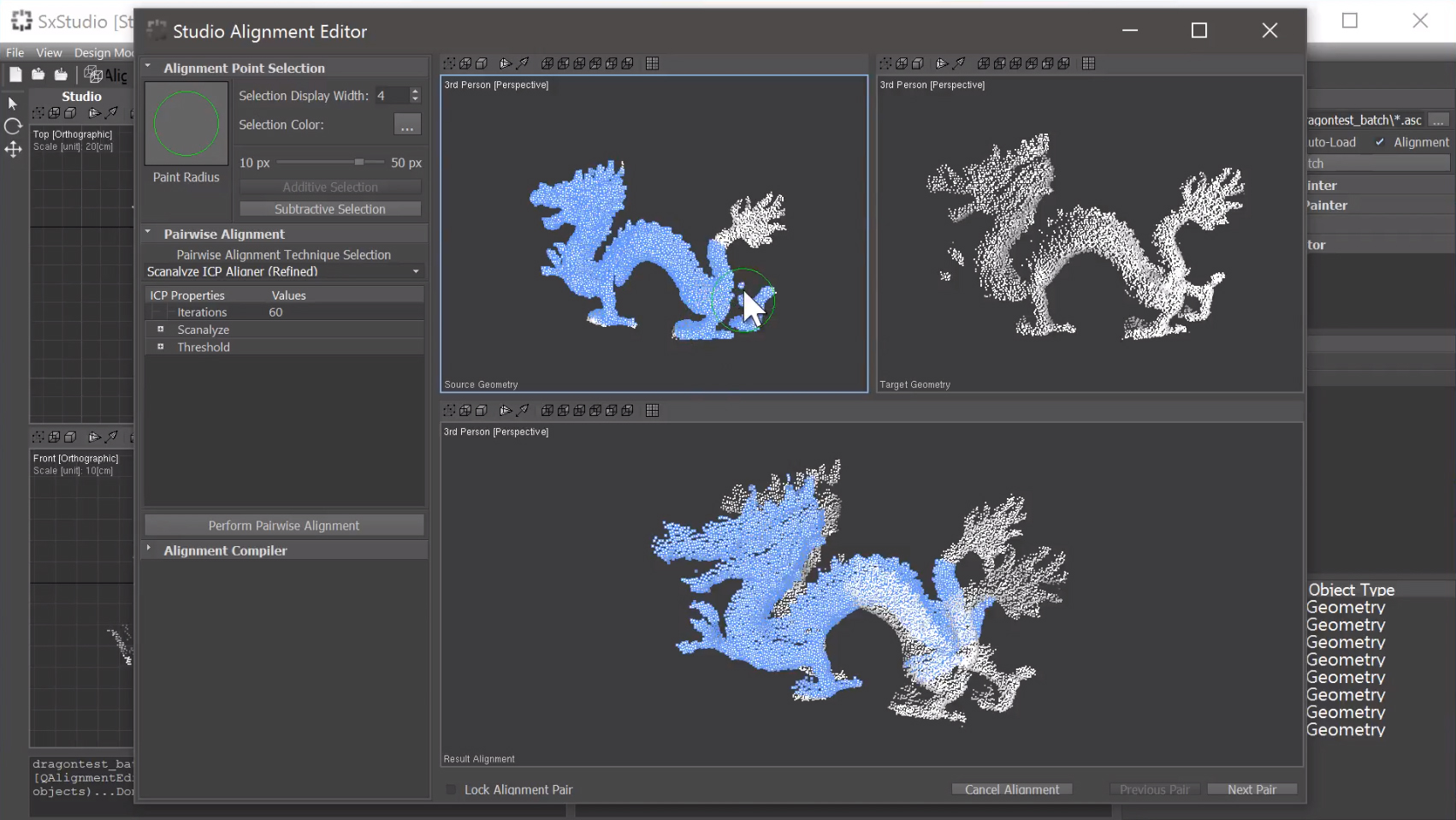
Description: Throughout the course of several years, significant progress has been made with regard to the accuracy and performance of pair-wise alignment techniques; however when considering low-resolution scans with minimal pairwise overlap, and scans with high levels of symmetry, the process of successfully performing sequential alignments in the object reconstruction process remains a challenging task. Even with the improvements in surface point sampling and surface feature correspondence estimation, existing techniques do not guarantee an alignment between arbitrary point-cloud pairs due to statistically-driven estimation models. In this paper we define a robust and intuitive painting-based feature correspondence selection methodology that can refine input sets for these existing techniques to ensure alignment convergence. Additionally, we consolidate this painting process into a semiautomated alignment compilation technique that can be used to ensure the proper reconstruction of scanned models.
Enhanced Pre-conditioning Algorithm for the Accurate Alignment of 3D Range Scans
Members:
S. Transue,
M. Choi
Description: The process of accurately aligning 3D range scans to reconstruct a virtual model is a complex task in generic circumstances. Yet by exploiting the data characteristics common to many mobile 3D scanning devices, we propose a two phase alignment solution that improves the alignment provided by the iterative closest point (ICP) algorithm. Current approaches target how the ICP algorithm aligns two range scans based on modifying minimization functions, sampling functions, and point correspondence techniques. However, while these approaches have provided subtle improvements in the alignment process, the ICP algorithm is still incapable of aligning low resolution range scans with very little overlap. Based on our proposed algorithm, we are able to increase the accuracy of the alignment provided by the ICP algorithm by 40% on low resolution scan pairs and we demonstrate the versatility of this approach by accurately aligning a variety scan pairs with small overlap regions.
Automatic Range Scan Point Cloud Registration using Hierarchical Levels and Feature Recognition Filters
Authors: Alejandro Alonso, Min-Hyung Choi
Description: Range scan point cloud registration problem has been well studied from the extensive exploration of the range images' degrees of freedom to the most commonly used iterative closest point (ICP) approaches. However most iterative point-wise methods work well only when the range images are close enough to solution configuration, and there's no guarantee that ICP would work or not from a given arbitrary configuration. Furthermore, the pair-wise nature of registration demands that each corresponding range image sequential pair must be known beforehand for a complete all-around registration from a batch of unordered range scan to build a complete 3D structure. This paper proposes a novel approach that aligns a set of unordered range images without knowing the correspondence between pairs to the point where ICP is guaranteed to succeed in its finer level registration. The registration task is nicely divided into two phases: the coarse registration which approximates the range images to a probable solution space, and the fine registration that takes the pre-aligned set of point cloud and further refines them to an optimally registered configuration. By incorporating a multilevel hierarchical structure similar to the ones used in bounding volume collision detection methods, this paper aims to reduce unnecessary processes in registration pipeline.
Download Links:
[ PDF ]