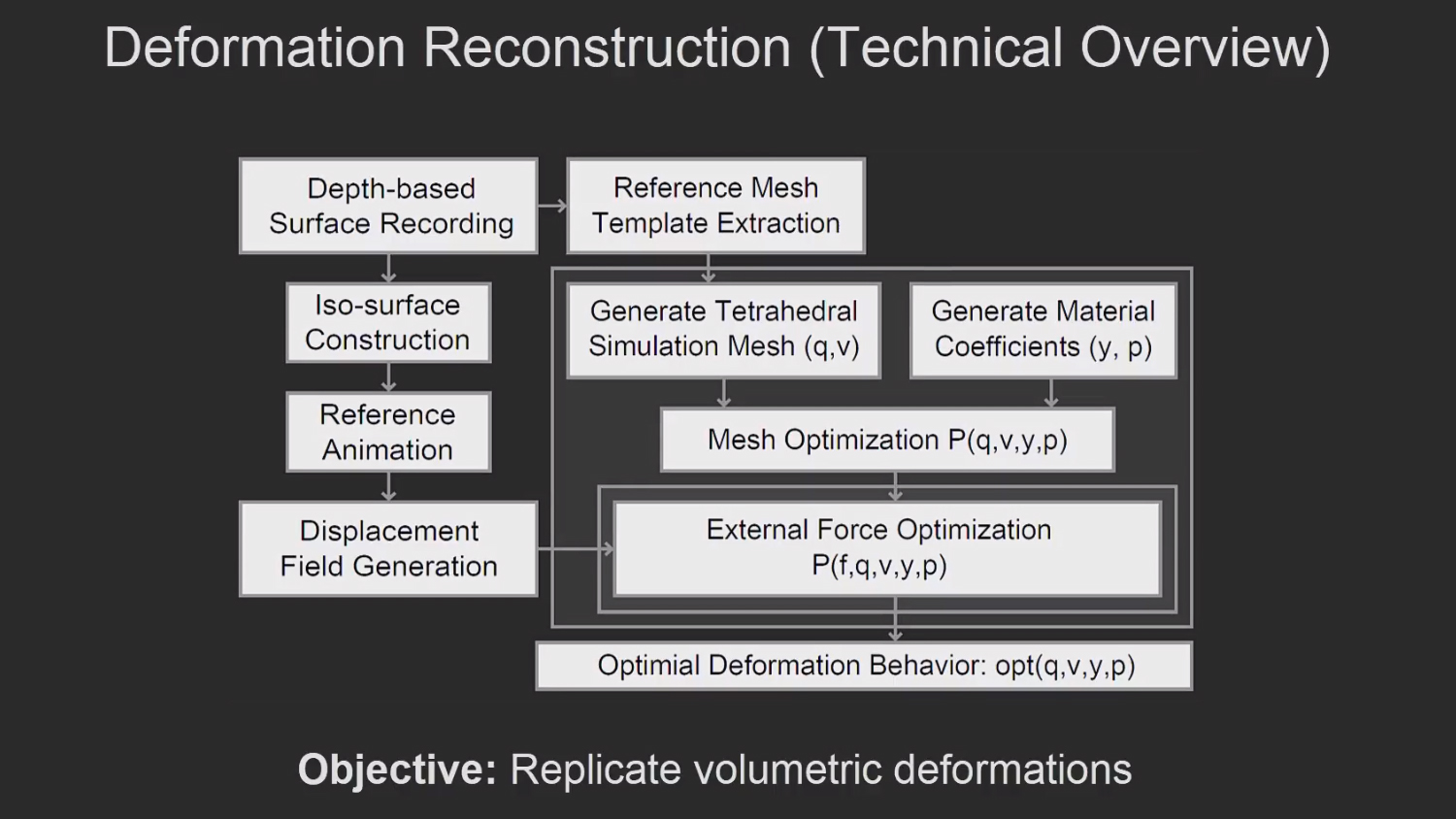
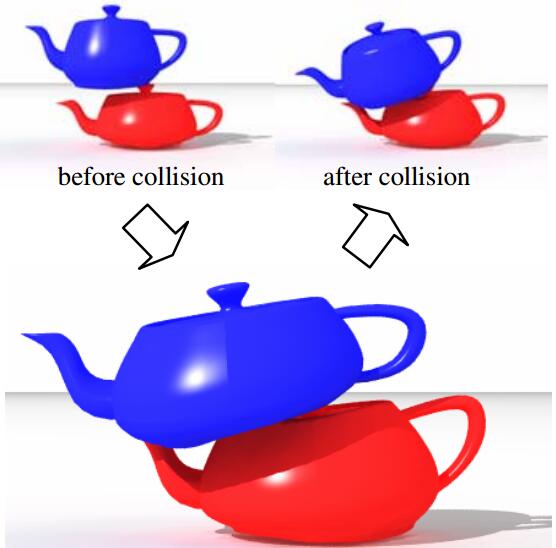
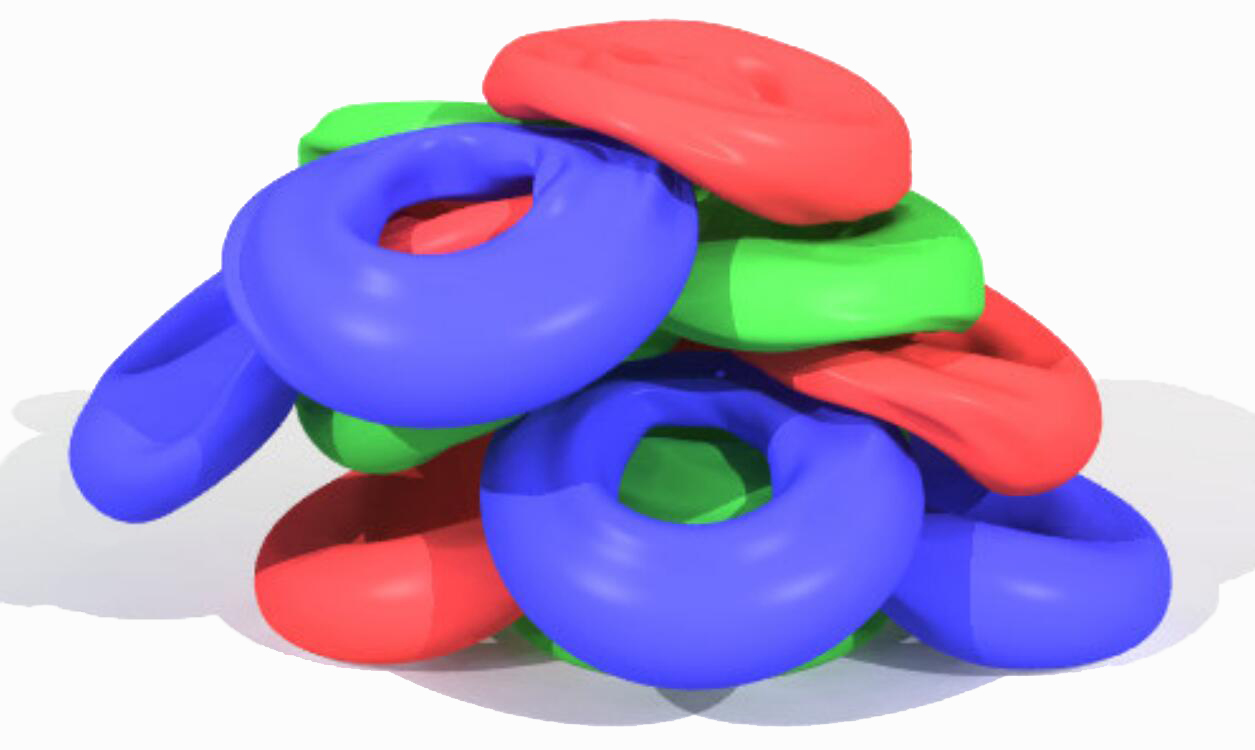
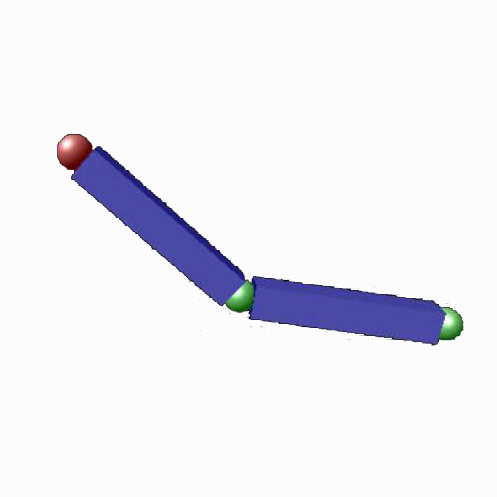
Physical Simulation

Authors: S. Jung, M. Hong, M. Choi

Authors: Shaila Abraham, Min-Hyung Choi

Authors: S. Jung, M. Choi
Authors: S. Jung, M. Hong, M. Choi
Authors: S. Jung, M. Choi
Authors: M. Hong, S. Welch, S. Jung, M. Choi, D. Park

Authors: Hongjun Jeon, Min-Hyung Choi
Authors: Sunhwa Jung, Hongjun Jeon, Min-Hyung Choi
Authors: Min Hong, Samuel Welch, John Trapp, Min-Hyung Choi
Authors: Sunwha Jung, Min Hong, Min-Hyung Choi